The Caveatron is compatible with several LIDAR modules from Slamtec, listed below. These modules provide 360° of rotational scanning, measuring hundreds of points in each rotation to create a detailed cross section of the cave. This scan repeats many times per second and the movement of the Caveatron through the cave generates the overall point cloud from which a 3D model of the cave can be generated. The scan resolution depends on how large the passage is and how fast you are moving. The resolution along the circumference of each scanned cross section of wall is a function of distance and can vary from less than 2 mm in a 1 m wide passage to 3 cm when the wall is 10 m away, depending on the LIDAR model. In the direction of motion, it depends on your speed and you can expect to obtain a resolution as small as 1 cm when you move especially slowly (such as in a crawlway), but may be more like 2-4 cm in larger passages where you may be moving faster.
The scan settings can be adjusted for different scan rates since lower scan rates produce a slightly less noisy measurement. The rotation speed is also adjustable to adjust the scan for different sizes of passages for more detail or if you want to travel more quickly.
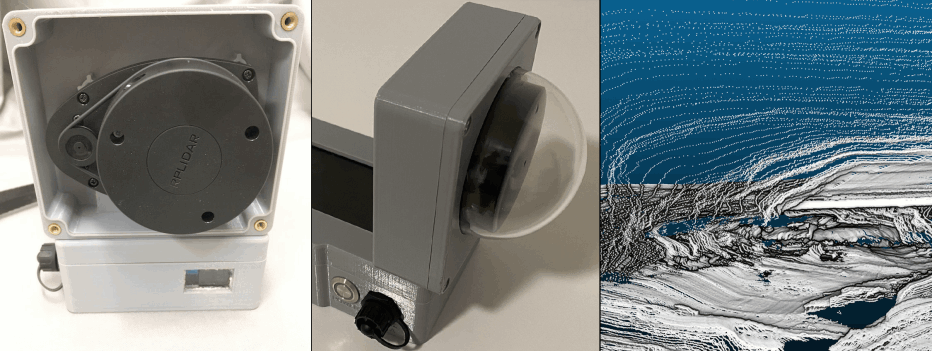
Protective covers can be used depending on the LIDAR model. The triangulation-based LIDARs require the use of flat windows and a design has been developed that has minimal corner obscuration and the post-processing software can remove any residual effects of the windows and corners. The time-of-flight LIDAR does not require a window for protection but an optional dome cover has been designed if additional protection is desired.